The forecast for yesterday also held some promise, but the weaker wind did not hold to the surface once it warmed up around noon. Time for some longboard sailing - I explored the little bays close to Egg Island with Gonzalo, who gave me some pointers about longboard racing. Nice!
The summer then ended again today. Temperatures dropped into the 50s overnight, with no sun to warm things up. But we got a rare treat - strong easterly winds! I went to East Bay, and was fully powered on a 6.3 m race sail and the 99 l slalom board. For comparison: on freeride gear, I would have picked a 4.7 and still would have been fully powered! The Kalmus windmeter showed averages around 28 mph, and gusts in the mid-30s. I ended up with a top speed of 32.77 knots, which is a personal best for the spot and the board, and my 5th-fastest session ever. Cool!
I took the opportunity to test my bluetooth GPS prototype again. I had tested it on the water a few times during the last two days, and the results looked great - very close to the results from the "gold standard" GW-60 watch. Here's a graph that compares the 10 second speeds of the bluetooth prototype, my Raspberry Pi Zero prototype, and the GW-60:


I find GPS Action Replay quite useful to have a really close look at data. Here's a movie that shows the aligned speed graphs (after editing out low-speed sections):
I stopped the movie several times when one of the GPS units deviated a lot from the others; usually, it was the red line, the second GW-60 GPS. This GPS simply stopped recording any data points for 50 seconds, and then kept dropping points for several minutes afterwards. Here's a graph from my own analysis software where this is immediately obvious:



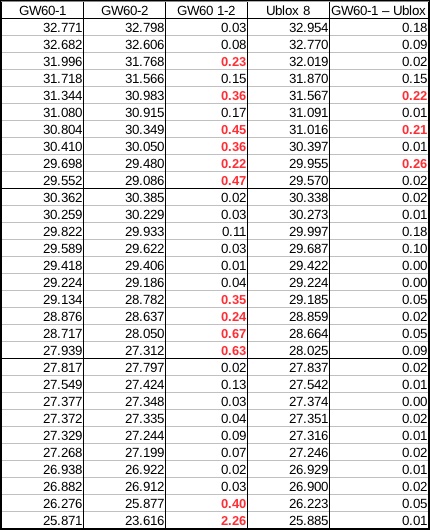
The bottom line is quite clear: the speed results for the bluetooth GPS are very close to the results from the two GW-60 watches. On average, the difference is less than 0.1 knots for 2 seconds; less than 0.05 knots for 10 seconds; and about 0.02 knots for 500 m. It is also well within the "+/-" ranges given by GPSResults (which range from ~0.06 knots for 500 m for the bluetooth GPS to ~0.35 knots for 2 second data for the GW-60). Looking at the 500 m results in the first table, it is clear that the differences between the two GW-60 watches is larger than the difference between the bluetooth GPS and the first GW-60 watch (which appeared to give more accurate data in this test than the second watch, if judged by the problem areas seen in the movie above).
It's no surprise that the bluetooth GPS is at least as accurate as the GW-60 watch. It uses a GPS chip (the u-blox 8) which is known to be more accurate; this is at least partly due to its ability to use data from various satellite systems at the same time (GPS, GLONASS, and Galileo), while the GW-60 is limited to only satellites from the American GPS satellites. In the tests, the ublox chip was typically able to use 15-19 satellites, while the watch was able to use only 8-10 satellites. More is better!
However, it was still necessary to prove that the prototype does indeed give accurate data, since many things can go wrong, including bad GPS chips and degraded signals from RF interference. The windsurfing tests have consistently shown that the prototype works very well, and actually better than the GW-60 watch when it encounters problems like the one described above.
For those amongst you who love numbers, I'll end with the numbers for the first graph in this post, which includes the accuracy estimates:
