If the image above makes you curious, keep reading. Otherwise, stop
now! This is a slightly geeky and (for most windsurfers) irrelevant post.
In recent discussions about GPS prototypes, some issues about acceleration arose. Current GPS analysis software has "acceleration filters" that aim to automatically identify artifacts by looking at the speed change from one point to the next. We know how fast we usually accelerate on windsurfers - something like 1-2 knots per second is typical. Much more than that, and it's probably an artifact (or perhaps a humongous catapult). Points with high acceleration are excluded from further analysis.
For 1 Hz data from the good old GT-31 GPS units, a threshold of 4 meters per second squared (4 m/s2) worked well. For the newer 5 Hz units, GPSResults automatically raises the threshold to 8 m/s2. However, when analyzing 10 Hz data from prototype GPS units, we often noted discrepancies to 5 Hz units, especially in the nautical mile runs, and often tracked the acceleration filter down as the culprit: if a single data point in the middle of a nautical mile run had an acceleration above 8.0 m/s2, then
the entire run would go missing, since runs cannot contain filtered points in GPSResults (with the default settings).
Why would 10 Hz data have more "problem points" with a high acceleration? Here are two possible causes:
- Noise and simple math: acceleration is speed difference divided by time. If we go from 5 Hz to 10 Hz, the number we use for time goes down from 200 ms to 100 ms. To illustrate this, let's assume that we have a "noise peak" of 2 knots (1 m/s) between two points. At 5 Hz, this gives at acceleration of 5 m/s2; at 10 Hz, we get an acceleration of 10 m/s2 which would trigger the filter.
- Actual movement of the GPS: we have seen above that a speed difference of just 1 m/s is enough to trigger the filter if we measure at 10 Hz. That corresponds to just 10 cm (4 inches) of (extra) movement. With a GPS on top of a helmet, just having the head move suddenly when hitting a piece of chop could cause such an extra movement; similarly, the wrist might move when the rig is hit by a big gust.
Which one of these is the culprit? Well, if it's an actual movement, we should be able to measure it, right? How about using an accelerometer? Every smart phone has one, and there are plenty of apps on Google Play to read it and store the acceleration numbers. Unfortunately, that raises the next question - how good are the accelerometers in smart phones?
Fortunately, the cold temperatures and lack of wind gave me time to play around a bit to get some answers. I'll switch to a question-and-answer format for the rest of the post to describe what I did.
Q: What were the questions?
- How does the accuracy of a smartphone accelerometer compare to the acceleration calculated from GPS speeds?
- Can we use a smartphone accelerometer to differentiate between random noise and actual movements in GPS data?
Q: What's the setup for the experiment to get answers?
The basic idea was to use a phone and a GPS in a controlled setting with regular acceleration changes, and to compare the data from the two devices. I used a
pendulum setup: as the pendulum goes back and forth, it goes from zero speed to maximum speed at the center, and back to zero speed at the top on the other side. The changes are gradual and smooth, basically creating sinus curves for both speed and acceleration. Here's a picture of the setup I used:
It's a dustpan with a stick, and a plastic case to hold an Android phone (Samsung Galaxy J1) and a u-blox 8 / Openlog GPS prototype. The case is attached by velcro. I stepped out onto the balcony, held the stick at the top, and let everything swing back and forth, doing roughly a half circle (180 degrees) with every swing.
Q: How did you log the data?
The GPS was set to log at 10 Hz (NAV-PVT only), after letting it warm up for 20-30 minutes. On the Android phone, I installed the app "Sensor Record", and logged Accelerometer data at 10 Hz (100 ms delay).
Q: How did you analyze the data?
I used software I wrote to read the GPS files, select the regions I wanted to use, and copy and paste the data into LibreOffice. I also copied and pasted the accelerometer data (from the .csv files the app made), and calculated a measure of total acceleration as:
a = sqrt(x*x + y*y + z*z) -9.81
where x, y, and z were the sensor reading for the three dimension, and 9.81 is the standard gravity (which the z sensor shows without movement if the phone is lying flat).
For the GPS data, acceleration was calculated as the difference in doppler speed to the previous point, and converted to m/s2.
To align the data from the two devices, I used the time stamps as a rough start, then created a line graph, and deleted cells in one column to create the exact alignment.
Q: What are the results?
Let's start with a graph that shows the measured GPS speed and acceleration:
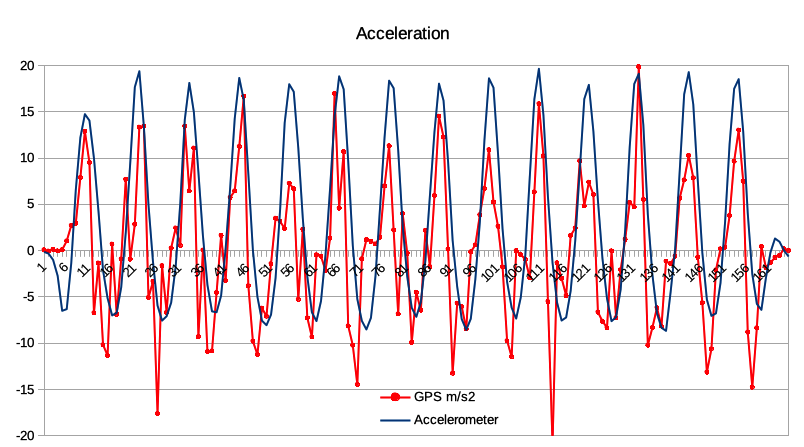
So this is roughly as expected, except that it's a bit noisy. All the movements and speeds were about the same, so all the peaks should be more similar than they are. The next graph compares the acceleration from the GPS (in red) to the acceleration from the phone accelerometer (in blue):
The acceleration measured by the phone was much smoother, and much closer to the actual motion of the pendulum (for a better look, check the first picture in this post, which is a plot of only the first section in this graph). So that's quite promising!
Basic physics tells us that the changes in speed for a pendulum should be smooth and continuous, generating a sinus curve. Therefore, changes in acceleration should also be smooth (remember that the derivate of a sinus curve still looks like a sinus curve, just offset a bit?). So let's look at the changes in measured acceleration in the accelerometer data:
The solid curve shows the changes in acceleration; the broken line shows the acceleration for comparison. You may notice that lines going down are a bit steeper than the lines going up - that's because I pushed the pendulum a bit from the right to the left so that the height would remain the same for every swing.
Now let's look at the changes in acceleration in the GPS data - we'll just add a read line to the graph:
This is much more chaotic! All the extra spikes in the data are from random errors in the GPS speeds. They are just much easier to see in this graph (which is typical for second derivative graphs).
Q: What are the answers to the initial questions?
- How does the accuracy of a smartphone accelerometer compare to the acceleration calculated from GPS speeds? The smartphone accelerometer is much more accurate (at least in this test). That's no big surprise, since it was designed to measure acceleration, while GPS units are primarily designed to determine location.
- Can we use a smartphone accelerometer to differentiate between random noise and actual movements in GPS data? Yes, it seems that the smartphone accelerometer can be a useful tool to answer this question. Note that in this experiment, the GPS was a bit more challenged than when windsurfing, because it was done right next to a house, and because the GPS antenna changed its orientation to the sky by 180 degrees during each run, ending up sideways to the sky.
Q: Why can't we just use accelerometers to calculate speed?
If the acceleration numbers are so accurate, it would seem logical that simply integrating them should give us speed numbers - would they not also be accurate? Only in theory (and perhaps in the absence of gravity .. but that's also a theoretical scenario). In practice and in the presence of gravity, we would have to know the
exact orientation of the sensors at all times to calculate accurate speeds. Any small errors would quickly accumulate. According to a
device manufacturer, even relatively small "angle error" of two degrees would lead to a velocity error of almost 2 knots within 10 seconds - much worse than what we can get from a GPS.
If you take a close look at the graphs above, you can see some obvious indications of the "angle problem". The graphs from the accelerometer acceleration has much higher positive than negative values. If we'd integrate that to get the final speed, we'd end up with a final speed in the 100 knot range!
That is a result of the way I treated earth's gravity in the calculations, subtracting it after combining the three dimensions. Theoretically, gravity should be subtracted from the z-dimension before adding the acceleration vectors to calculate net acceleration. That's easy enough if the phone orientation is (a) known and (b) constant. But in the experiment above, the phone changed orientation relative to the earth: at the ends of the arcs, it was standing on its side, while in the middle, if was flat. So at the ends, the y-sensor would have measured gravity, while in the middle, it was the z-sensor; and in between, both of them at varying degrees. In theory, it would be possible to do a more accurate calculation by measuring the orientation at the points of zero speed, and calculating the intermediate positions; but that is rather complicated, and not required for this experiment.